 HardwareHardware
HardwareHardwareWe pack 3 cannons and a .45 caliber, double barreled, gold plated... Oh wait. Not that hardware.
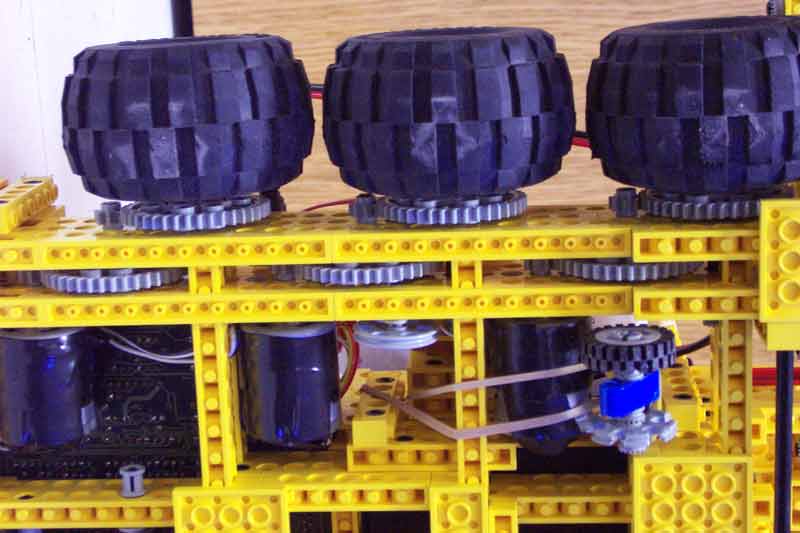
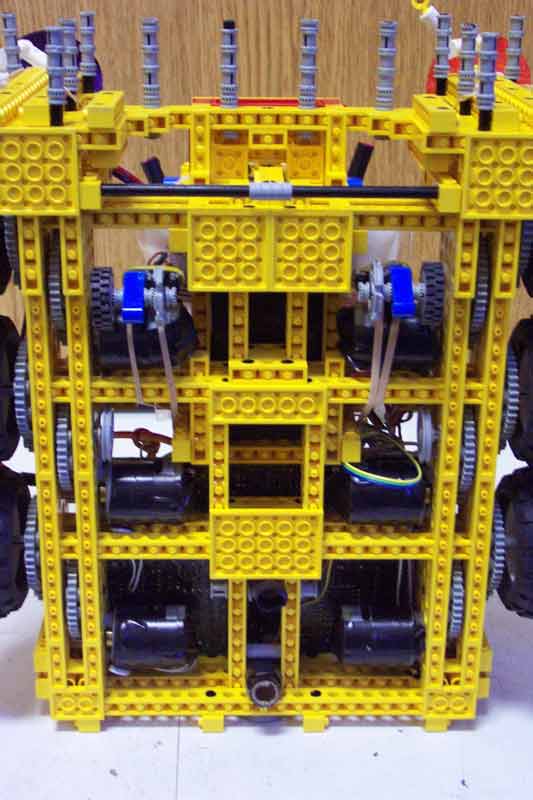
Since our strategy was easy, our hardware was equally uncomplicated. Since our robot was not using any sort of collection device, we were able to use all six motor ports for wheels. We had six wheels, each connected to a motor. This gave us good speed and traction. We used a 1 to 25 gear ratio that provided, with six motors, very good speed while still having good enough torque to push other bots around. We made our robot very heavy to help with traction and build up momentum also.
The gearboxes for these were designed to be very narrow and line up to form a row of gearboxes on each side of the robot that was not only almost indestructible, but also formed the major structural backbone of the robot. The rest of the robot was mounted on the connections between the gearbox column for each side.
Every thing in the entire robot that could be reinforced was. There are pegs in almost every spot where they could go, and we cross beamed everything multiple times. Our goal was to basically build a homing bulldozer.
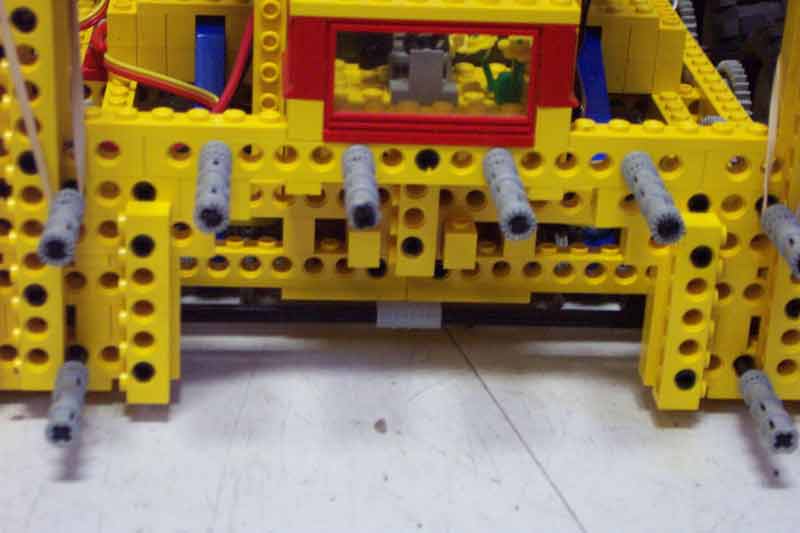
The spikes on the front were intended to ensnare the other robot, so that if we hit at an angle, they would still not escape. This was demonstrated to work during one of the Saturday test runs.
The indentation in the front center face catches the initial ball that we store and provides an out of the way place for it to stay so that it doesn't form a bumper between us and the other robot.
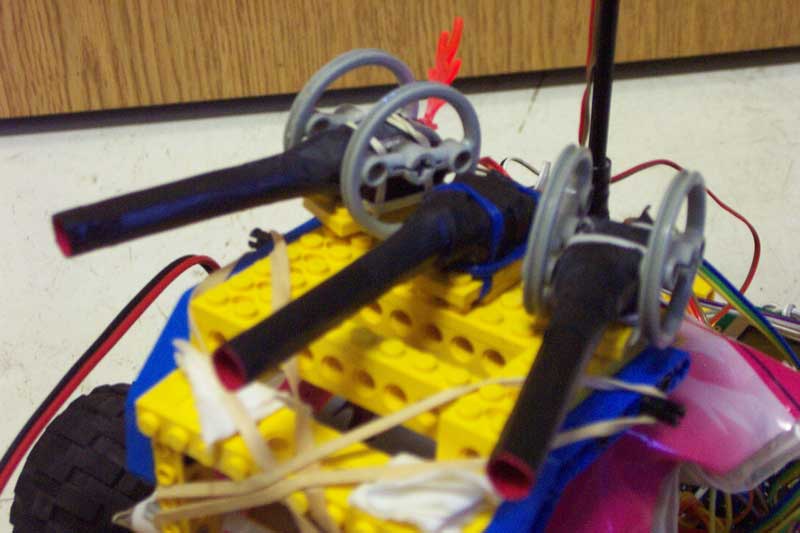
Other than that we had our IR beacon and we had three IR sensors mounted close to the center of the robot up high and pointed at an angle upwards towards the IR beacon of the other robot. The three sensors were pointed in slightly different angles. The middle one was pointed straight, the left one was pointed slightly to the left, and the right one was pointed slightly to the right. They each had a long tube on the front to limit their field of view to a manageable angle.
Dip switches: we used every dip switch to control different settings. Dip 3 toggled a setting that would allow our robot to ignore the information from the IR sensors and just move forward at full speed. Dip 4 disabled forward movement so that it just rotated (for testing purposes). The infamous dip-2 at one point controlled bitch-slap mode, in which our robot would hit the other robot, use its shaft encoders to detect that it had stopped, back up, and repeat the process again and again. This mode was removed from the final version.
Our robot was also equipped with a pair of Walgreens brand ladies nylon stockings. Because no pimp is complete without his cheap hose.
We included a pair of extra wheels held against the ground by rubber bands. These were used to mount shaft encoders, which we wrote lots of test code for, but didn't use in the final version.
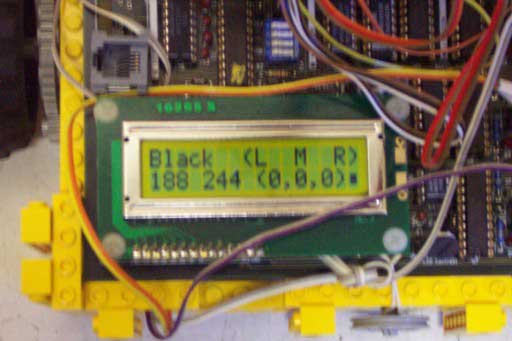
The readout on our display at the beginning was important, too. Since our strategy required the cooperation of the other robot (in the form of a working IR beacon), we made sure to put a readout of what the IR sensors saw on the initial screen before the competition began. This proved very important, as we faced two different robots with non-working IR beacons.
The main two goals we had in mind when we built the robot were simplicity/reliability and indestructibility. We accomplished both.
Decorations:
Oh, yeah. And it has twin pimp heads with custom made hats and beatdown implements. We'll cut you!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}