 |
ronelib
Operating System for the r-one robot
|
|
ronelib
Operating System for the r-one robot
|
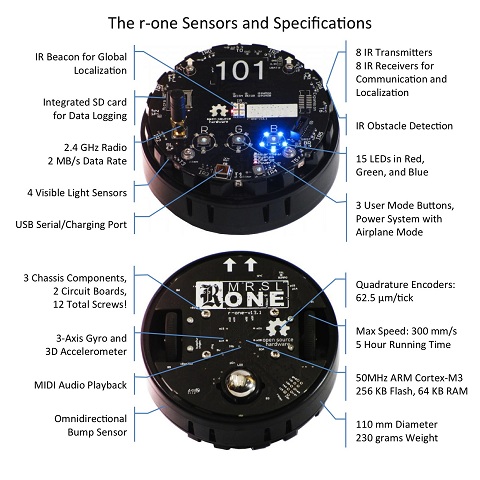
The r-one robots are designed by the Multi-Robotic Systems Lab at Rice University
The code base is designed to be extensible, with a three-layer software stack:
SensorTest, SuperDemo) ] ronelib (basic behaviors that will be used to make other code) ] roneos (hardware, sensors, actuators, system-level code) ]basicBehaviors behaviorSystem bumpBehaviors Navigation-midangle remoteControl externalPose robotCanvas BroadcastComms BroadcastMinMax NbrNbrComms neighborListOps A complete list of functions in roneLib can be found here.
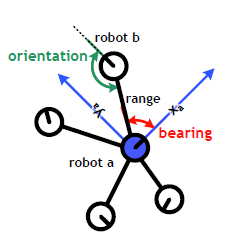
The blue lines projecting from robot a (also colored blue) establish the robot's local coordinate system . The x and y axis are labeled.
Range is indicated by the thick black line between robot a and robot b. At this point, r-one robots do not have range measuring capabilities.
Orientation is measured from a robot's heading, indicated by the line inside the robot circle, to the point on the neighboring robot where range would be measured.
Bearing is measured from a robot's x axis to the point on the neighboring robot where range would be measured.
 1.8.4
1.8.4 
